
Die Nutzbarkeit eines Gierratensensors hängt von seiner guten Anbindung, seiner einfachen Anpassung an verschiedene Fahrzeugplattformen und seiner sicheren Ankunft am Zielort ab. Dieser Artikel untersucht gängige Schnittstellentypen (analog, CAN, LIN, SPI), bewährte Installationsmethoden, Anpassungsmöglichkeiten sowie empfohlene Verpackungs- und Versandmethoden für eine reibungslose Integration und Lieferung.
1. Schnittstellentypen und Pinbelegungen
- Version mit analogem Spannungsausgang
- Pin-Definitionen
- VCC: +8 V bis +16 V (typischerweise +12 V)
- Masse: Massebezug
- AUS: Analogspannung (0,5 V–4,5 V Abbildung auf –FS–+FS)
- STATUS (optional): Fehler-/Bereitschaftsstatusausgang (Open-Drain oder Push-Pull)
- Verwendungshinweise
- Die Lastimpedanz sollte zwischen 1 kΩ und 10 kΩ liegen, um einen Spannungsabfall zu vermeiden
- Halten Sie die Kabelbaumlänge unter 500 mm. Wenn sie länger ist, erhöhen Sie den Kabeldurchmesser (≥AWG22), um den Spannungsabfall zu verringern
- Pin-Definitionen
- Digitale CAN-Ausgangsversion
- Pin-Definitionen
- VCC: +8 V bis +16 V
- Masse: Boden
- CAN_H / CAN_L: Differenzielle CAN-Bus-Leitungen (bis zu 1 Mbit/s)
- WAKE (optional): Single-Wire-Wake-Up-Pin für Standby-Modi
- STATUS (optional): Störungsanzeige oder Bereitschaftssignal
- Verwendungshinweise
- Erfordert einen 120 Ω Abschlusswiderstand zwischen CAN_H und CAN_L
- CAN-ID, Bitrate und Nachrichtentaktung (z. B. 10 ms oder 20 ms Zyklus) können werkseitig konfiguriert oder über UDS neu programmiert werden
- Pin-Definitionen
- Digitale LIN-Ausgangsversion
- Pin-Definitionen
- VCC: +8 V bis +16 V
- Masse: Boden
- LIN: Single-Wire-LIN-Kommunikation (typischerweise 19,2 kbps)
- WAKE (optional): Aufwecken über Low/High am WAKE-Pin
- Verwendungshinweise
- Erfordert externen Pull-Up-Widerstand (1 kΩ–2,2 kΩ) zu +5 V auf der LIN-Leitung
- Die Knotenadresse (Slave-ID) kann im Werk oder über die On-Board-Programmierung eingestellt werden
- Pin-Definitionen
- SPI/I²C-Ausgangsversion (Entwicklung/Test)
- SPI-Pins: SCLK (Takt), MISO (Master-Eingang/Slave-Ausgang), MOSI (Master-Ausgang/Slave-Eingang), CS (Chipauswahl), VCC, GND
- I²C-Pins: SCL (Takt), SDA (Daten), VCC, GND
- Verwendungshinweise
- SPI: Stellen Sie sicher, dass Taktpolarität (CPOL) und Phase (CPHA) mit den Hosteinstellungen übereinstimmen; empfohlener Takt ≤5 MHz
- I²C: Verwenden Sie Pull-Up-Widerstände von 4,7 kΩ–10 kΩ; hauptsächlich für Kalibrierung und Prototyping – in der Massenproduktion werden oft CAN/LIN verwendet
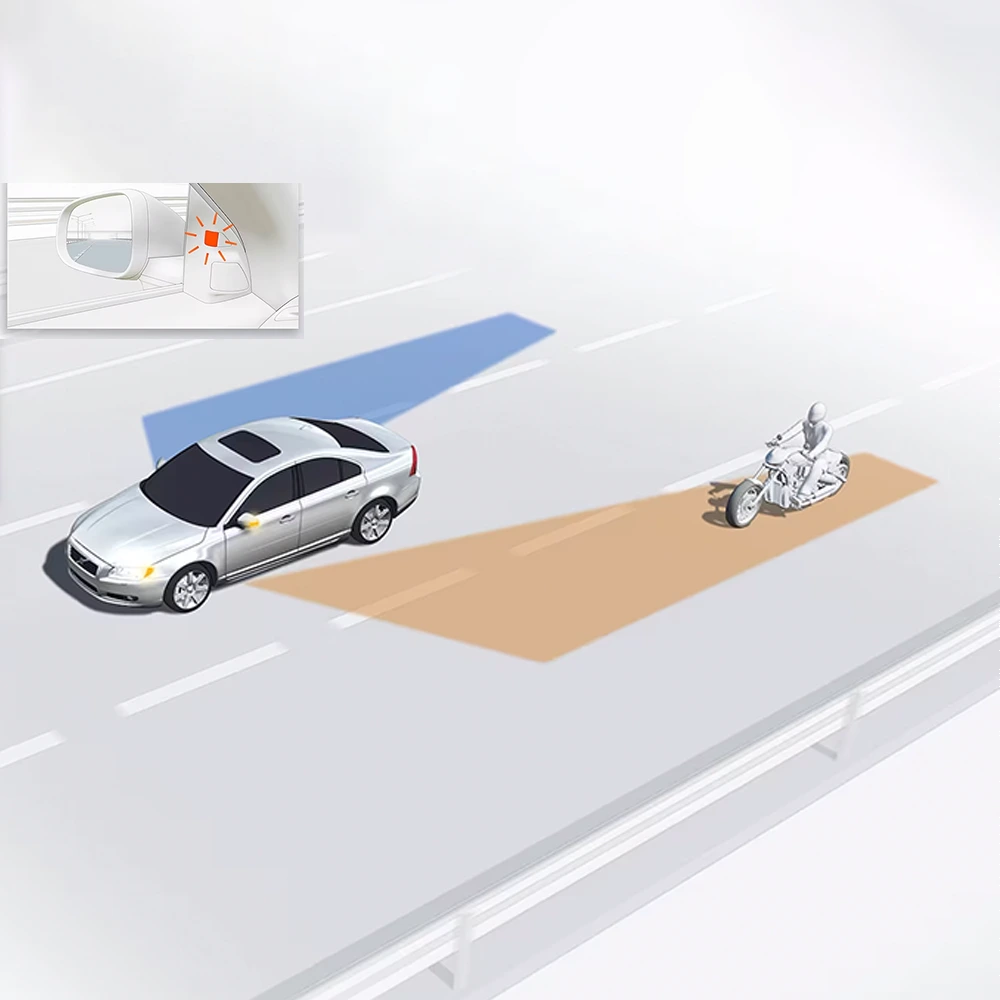
2. Einbauort & Montagehinweise
- Gängige Montageorte
- Unter der Lenksäule: Nahe am Fahrzeugschwerpunkt, wodurch der Fahrgestellflexfehler minimiert wird
- Nahe dem vorderen Hilfsrahmen: Bevorzugt für Nutzfahrzeuge und schwere Lkw aufgrund der größeren Nähe zum Fahrzeugschwerpunkt
- Hinter der Instrumententafel: Üblich für universelle Aftermarket-Module, die in eine starre Unterkonstruktion einrasten
- Ausrichtung und Orientierung
- Stellen Sie sicher, dass die X/Y/Z-Achsen des Sensors mit dem Koordinatensystem des Fahrzeugs übereinstimmen. Andernfalls wenden Sie eine 3D-Koordinatentransformation in der ECU an.
- Die Montagefläche muss eben und frei von Lücken sein. Vermeiden Sie zu dicke Gummi-Isolationshalterungen, die eine Neigung verursachen.
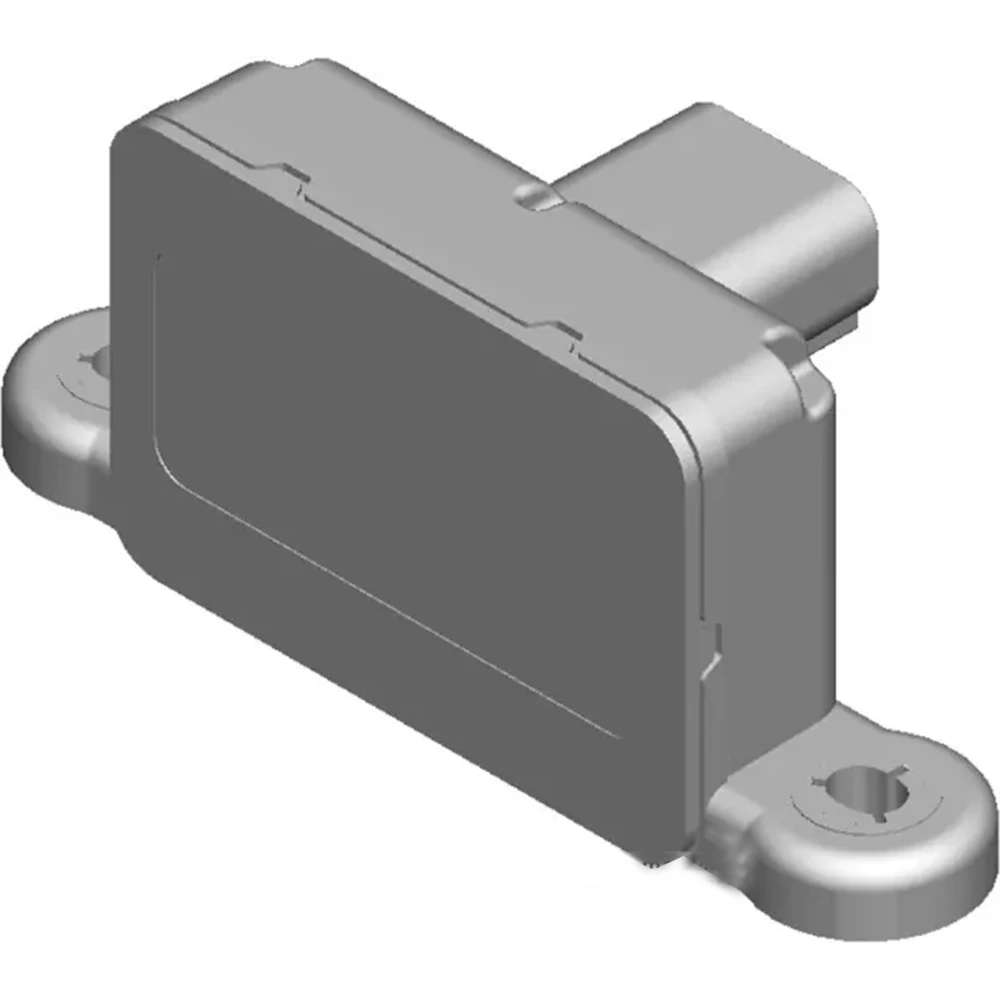
- Befestigungsmethoden und Hardware
- Verschraubt: M4/M5-Schrauben mit Federscheiben oder Nylon-Kontermuttern, um ein Lösen bei Vibrationen zu verhindern
- Snap-In-Halterung: Ermöglicht schnelles Entfernen, muss aber die Stabilität der Halterung und eine präzise Ausrichtung gewährleisten
- Temporäres Epoxid/Silikon (nur zum Testen): Nicht für die Produktion empfohlen; nur für Prototypfahrzeuge verwenden
- Kabelbaumverlegung
- Länge: Halten Sie den Kabelbaum unter 500 mm; wenn er länger ist, erhöhen Sie den Leiterquerschnitt, um einen Spannungsabfall zu vermeiden, und fügen Sie bei Bedarf eine Abschirmung hinzu
- Abschirmung und Erdung: Umgeben Sie CAN-/LIN-/Analogkabel mit einem geflochtenen Schirm und binden Sie ihn am Anschluss an die Gehäuseerdung, um elektromagnetische Störungen zu vermeiden.
- Vermeiden Sie Hitze und scharfe Kanten: Verlegen Sie die Leitungen nicht in der Nähe von Auspuffrohren, heißen Stellen im Motorblock oder scharfen Metallkanten im Inneren, um einen Verschleiß der Isolierung zu verhindern.
Seriennavigation:
- Positionierung und Kernfunktionen des Gierratensensors im Automobilbereich
- Kernkomponenten und Funktionsprinzipien des Gierratensensors
- Technische Daten und Modellhandbuch zum Gierratensensor
- Anpassungsfähigkeit und Zuverlässigkeit des Gierratensensors an die Umgebung
- Schnittstellen für Gierratensensoren