
In modernen Fahrzeug-Steuersystemen Lenkwinkelsensoren (SAS) sind mehr als nur Drehgeber – sie liefern Echtzeitdaten für die Fahrzeugdynamik und sicherheitskritische Systeme. Als Fertigungsingenieur in der Automobilelektronik habe ich hautnah miterlebt, wie präzise Winkelerkennung direkt zu Funktionen wie elektronischer Stabilitätskontrolle, Spurhalteassistent und aktiven Lenksystemen beiträgt. Dieser Artikel bietet einen praktischen Überblick darüber, was diese Sensoren sind, wie sie funktionieren und warum sie wichtig sind.
Was ist ein Lenkwinkelsensor?
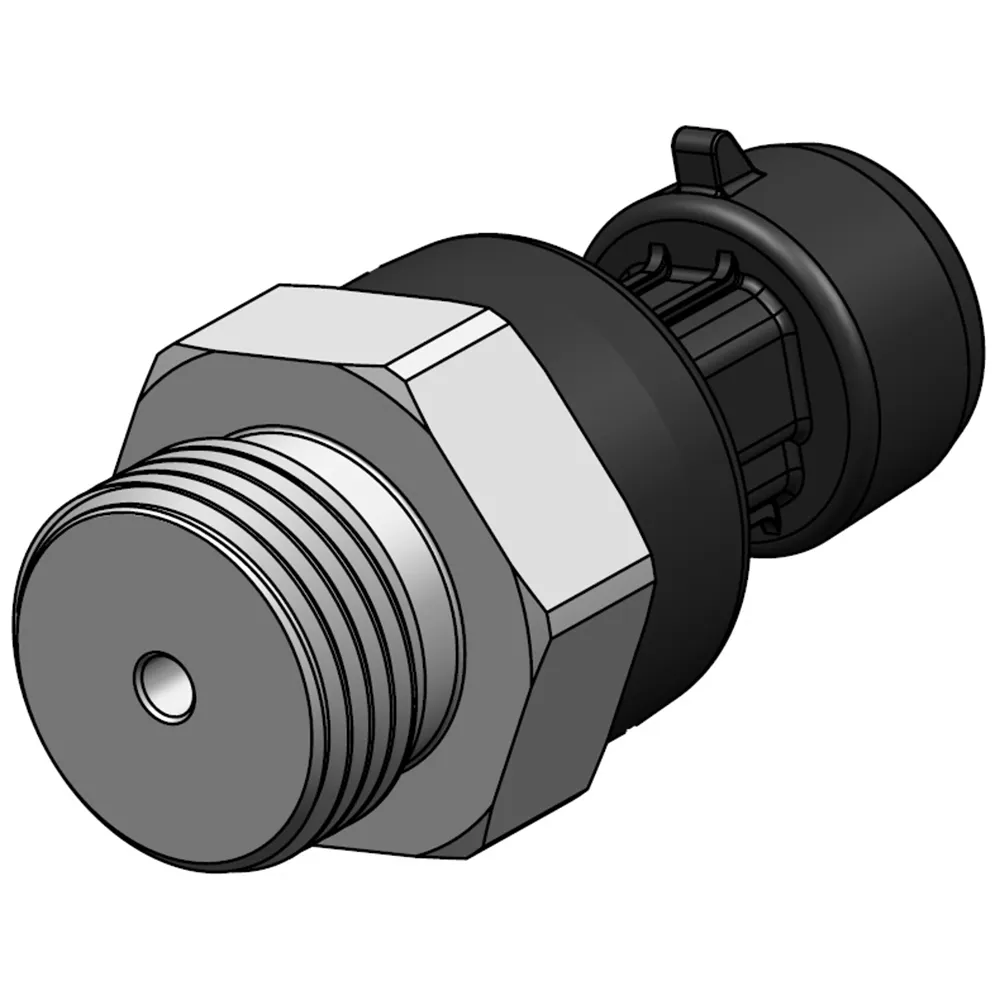
Ein Lenkwinkelsensor misst den Drehwinkel und Richtung des Lenkrads oder Lenkwelle. Seine Hauptfunktion besteht darin, Lenkeingaben in Echtzeit an verschiedene Fahrzeugsteuergeräte zu melden. Diese Sensoren sind typischerweise an der Lenksäule, zwischen dem Rad und dem elektrischen Servolenkungsmotor (EPS).
Je nach Design können sie Folgendes ausgeben:
- Absoluter Winkel (volle Drehposition von 0° bis ±720° oder mehr)
- Relativer Winkel (Änderungen der Richtung oder Geschwindigkeit)
- Nulldurchgangs- und Richtungssignale
In SAS verwendete Kerntechnologien
Lenkwinkelsensoren verwenden typischerweise eine der folgenden Technologien:
- Optische Encoder
- Verwenden Sie eine Codescheibe und eine Lichtquelle, um die Winkelposition zu erkennen
- Hohe Auflösung und Genauigkeit
- Bei unzureichender Abdichtung empfindlich gegenüber Staub und Temperatur
- Hall-Effekt-Sensoren
- Magnetfeldbasierte Messung mit weniger beweglichen Teilen
- Hohe Zuverlässigkeit, gut für raue Umgebungen
- Häufig in Massenmarktanwendungen im Automobilbereich
- Resistive Potentiometer (ältere Technologie)
- Einfach und kostengünstig
- Unterliegt Verschleiß und Drift
- Selten in modernen Fahrzeugen
Die meisten OEM-qualifizierten SAS-Produkte kombinieren heute Zweikanal-Hall-Effekt-Sensor mit redundante Verarbeitung um funktionale Sicherheitsstandards zu erfüllen (z. B. ISO 26262 ASIL-B oder höher).
Schlüsselfunktionen der Fahrdynamik
Lenkwinkeldaten sind in mehreren Systemen von entscheidender Bedeutung:
- Elektronisches Stabilitätsprogramm (ESP/ESC) Vergleicht die tatsächliche Gierbewegung mit der geplanten Fahrtrichtung. Bei Über- oder Untersteuern des Fahrzeugs bremst das System korrigierend ab.
- Elektrische Servolenkung (EPS) Passt die Lenkunterstützung basierend auf Winkel und Lenkgeschwindigkeit an.
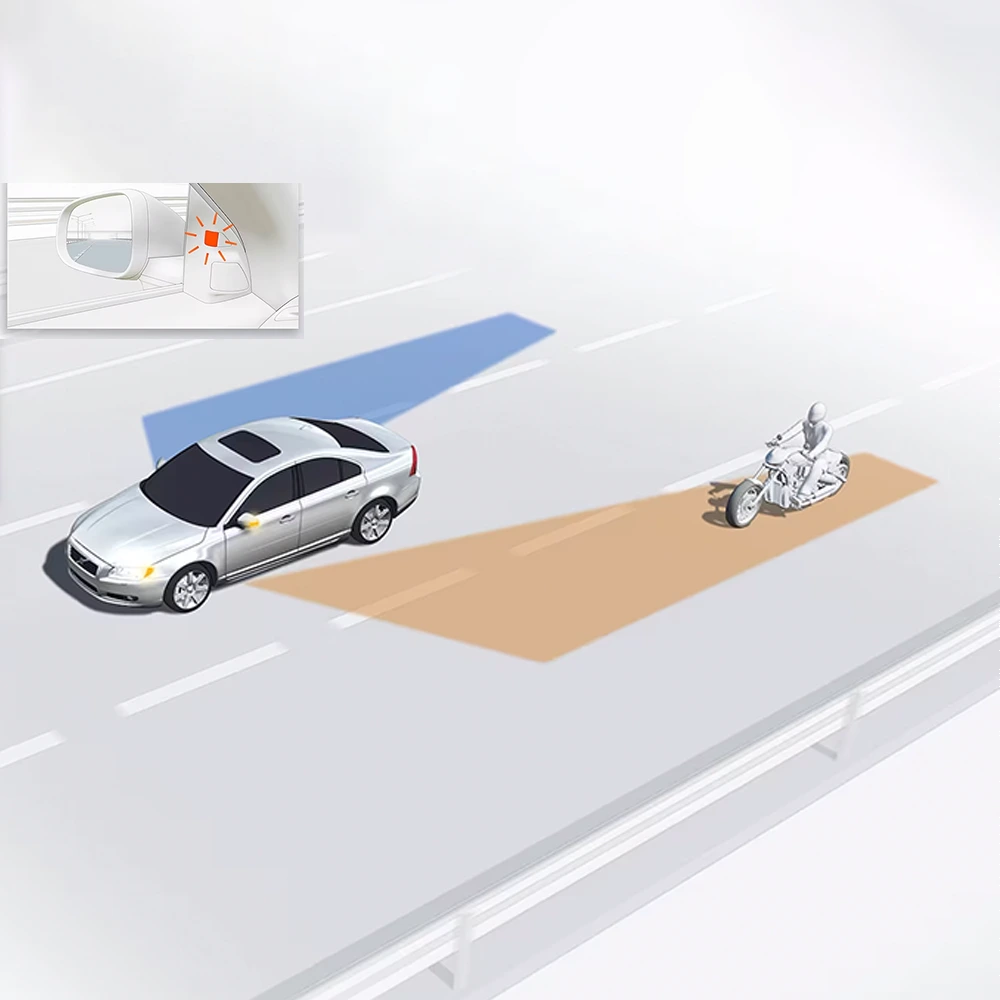
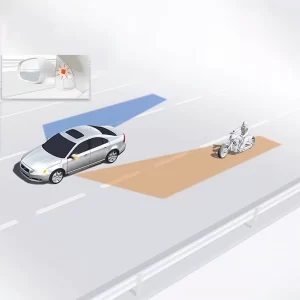
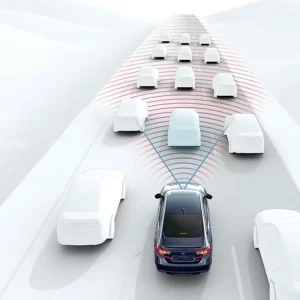
- Fortschrittliche Fahrerassistenzsysteme (ADAS) Unterstützt Spurhalteassistent, adaptive Geschwindigkeitsregelung und automatisches Parken.
- Allradlenkung und Torque Vectoring Verwendet Lenkeingaben, um den Hinterradwinkel oder die Drehmomentverteilung zu koordinieren.
Wir betrachten den Sensor nicht isoliert, sondern als Signalquelle in einem geschlossenen Regelkreis, wo Timing, Genauigkeit und Signalzuverlässigkeit von entscheidender Bedeutung sind.
Signalqualität und Systemsynchronisation
Für Echtzeit-Fahrzeugdynamik, Latenz Und Abtastrate sind entscheidend. Ein leistungsstarker Lenkwinkelsensor verfügt typischerweise über:
- Abtastrate von ≥100 Hz
- Genauigkeit innerhalb ±1°
- Wiederholbarkeit unter starke Vibrationen und EMI-Bedingungen
Es ist auch üblich, Temperaturkompensationsalgorithmen, Diagnose-Feedback, Und Selbstkalibrierungsroutinen in der Sensor-Firmware.
Lenkwinkelsensor im CAN-Netzwerk
In vielen modernen Architekturen ist das SAS integriert in die CAN-Bus oder FlexRay-Netzwerk. Es teilt Daten mit Modulen wie:
- BCM (Karosseriesteuergerät)
- EPS-Steuerung
- ABS/ESP-Einheit
- ADAS-Steuergerät
Aus diesem Grund standardisierte Datenrahmen und eine robuste Fehlerprüfung (CRC, Timeout-Überwachung) sind ein Muss.
Der Lenkwinkelsensor ist ein leiser, aber kritischer Teil jedes Fahrzeugs, das mit modernen dynamischen Steuerungssystemen ausgestattet ist. Aus Sicht des Fertigungsingenieurs ist seine mechanische Präzision, Signalintegrität, Und Integrationszuverlässigkeit sind ausschlaggebend dafür, ob erweiterte Fahrzeugsteuerungsfunktionen reibungslos und sicher funktionieren.
📚 Seriennavigation
- ✅ Grundlagen von Lenkwinkelsensoren in Kraftfahrzeugen und ihre Rolle in der Fahrzeugdynamik
- Designarchitektur – Sensorstruktur, Redundanz und Signalschnittstellen
- Wichtige technische Daten – Auflösung, Linearität und Winkelbereich
- Umweltprüfungen und EMV-Konformität in realen Anwendungen
- Integration und Kalibrierung an Fahrzeugmontagelinien