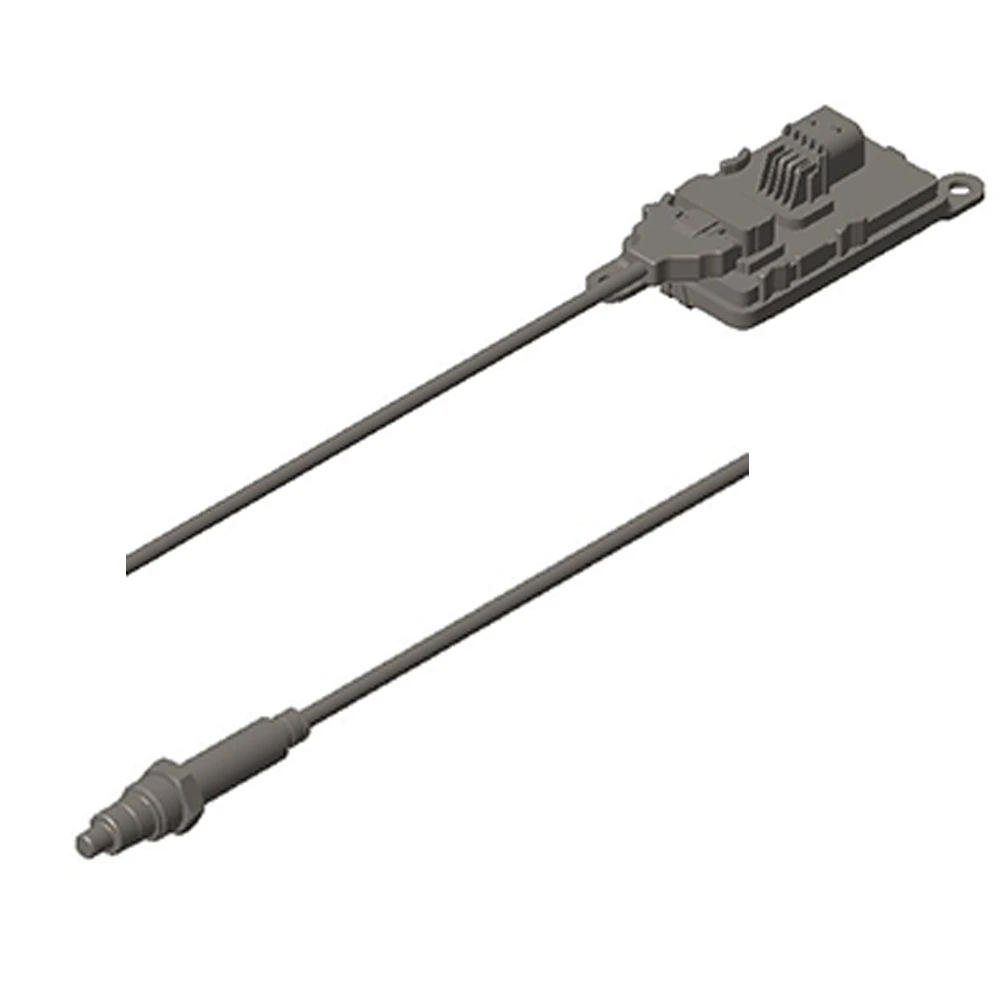

Diseñar un sensor de ángulo de dirección (SAS) confiable es solo una parte del proceso. Una vez que el sensor llega al usuario, debe... instalado con precisión, verificado eléctricamente, y calibrado En coordinación con los sistemas de dirección y estabilidad del vehículo. Como ingeniero de fabricación, he trabajado en estrecha colaboración con los equipos de integración de vehículos para garantizar que las unidades SAS no solo funcionen en el laboratorio, sino que también funcionen a la perfección después del ensamblaje final. En este artículo, exploramos Cómo se instala y se pone a cero SAS, el flujos de trabajo de calibración, y el estrategias de diagnóstico Se utiliza en entornos de producción en masa y de servicio.
Instalación: Ajuste mecánico y control de par
Un sensor de ángulo de dirección normalmente se monta en:
- El eje de la columna de dirección
- Dentro de una conjunto de resorte de reloj (para sistemas con anillos colectores integrados)
- Directamente en módulos de dirección asistida eléctrica
Consideraciones clave de instalación:
- Pasador o ranura de alineación para asegurar el posicionamiento angular
- Control de par de montaje (normalmente 0,6–1,2 Nm) para evitar la deformación
- Evite el par excesivo, lo que puede estresar las carcasas de plástico o cambiar la alineación magnética
Consejo: Verifique siempre que el volante esté centrado y las ruedas rectas antes de apretar el sensor. Una desalineación en esta etapa provoca errores de calibración en cascada.
Conexión eléctrica y correspondencia de protocolos
Las unidades SAS modernas admiten:
- Bus CAN (ID de 11 bits o 29 bits, normalmente 250 o 500 kbps)
- LIN (utilizado en módulos de dirección más simples)
- Salida analógica o PWM (diseños heredados o sensibles a los costos)
Durante la integración:
- El sensor debe coincidir con el Arquitectura de bus y configuración de ID
- Los conectores deben proporcionar contacto de baja resistencia y Blindaje EMC
- Los pines deben estar alineados con el cableado del lado del vehículo; un cableado incorrecto puede causar un DTC (código de diagnóstico de problemas) instantáneo.
Algunos módulos SAS incluyen salidas redundantes (por ejemplo, dos señales de ángulo) para seguridad funcional (ISO 26262 ASIL-B o superior).
Calibración del punto cero: el paso más crítico
La calibración del punto cero es el proceso de enseñar al vehículo que el volante está en la posición “recta”.
Procedimientos típicos:
- Centrado mecánico de ruedas delanteras
- Inicialización del sensor a través de la herramienta OEM (por ejemplo, ODIS, GDS2, Techstream)
- Escritura diferida del ángulo de 0° al sensor EEPROM
- Confirmación del mensaje CAN con bandera de ángulo cero establecida
No calibrar correctamente puede provocar:
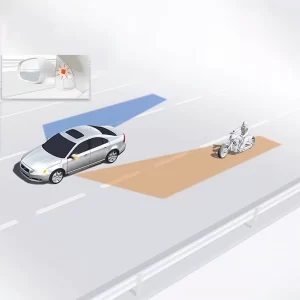
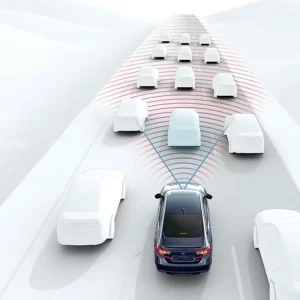
- Avisos de mal funcionamiento del ESP y ESC
- Asistencia de dirección a la deriva
- Inexactitud en el mantenimiento del carril
Algunos fabricantes de equipos originales (OEM) integran autoaprendizaje lógica que recalibra el punto cero con el tiempo, pero la alineación inicial sigue siendo obligatoria.
Diagnóstico y detección de fallas
Las unidades SAS son necesarias para dar soporte a:
- Códigos DTC estandarizados (por ejemplo, U0126, C1231)
- Comprobación de plausibilidad de la señal:saltos repentinos o salida ruidosa
- Detección de ángulo fuera de rango
- Monitoreo de voltaje y reinicio del sistema de vigilancia
En la producción en masa, las herramientas de diagnóstico funcionan a prueba de función:
- Comprobación de la fuente de alimentación (9–16 V)
- Respuesta de la señal de ángulo al girar la rueda
- Verificación de CRC e ID de firmware
Algunas unidades SAS ofrecen UDS (Servicios de Diagnóstico Unificados) sobre CAN para:
- Re-flasheo del firmware
- Restablecimiento del desplazamiento del ángulo
- Lectura de la fecha de producción y el ID de calibración
Consideraciones de servicio y recalibración
A menudo es necesaria la recalibración del SAS:
- Después de reemplazar la cremallera o la columna de dirección
- Después del servicio de alineación
- Al reemplazar el resorte del reloj o el módulo del airbag
Para simplificar esto:
- Muchos sensores incluyen memoria no volátil para conservar el último ángulo conocido
- Otras características lógica de autocalibración desencadenado por patrones de conducción
Desde una perspectiva de ingeniería de servicios, una recalibración rápida y confiable significa menos devoluciones y flujos de trabajo de mantenimiento más rápidos.
La integración es donde la teoría se encuentra con la carretera
Incluso el SAS más preciso tendrá un rendimiento inferior si está mal integrado. La alineación mecánica, la configuración de la comunicación y las rutinas de calibración deben controlarse rigurosamente durante los flujos de trabajo de producción y servicio.
Un proyecto SAS exitoso no termina con el envío: termina con un automóvil en la carretera, en línea recta, estable y seguro.
Navegación de la serie
- Fundamentos de los sensores de ángulo de dirección automotriz y su función en la dinámica del vehículo
- Arquitectura de diseño: estructura del sensor, redundancia e interfaces de señal
- Especificaciones técnicas importantes: resolución, linealidad y rango angular
- Pruebas ambientales y cumplimiento de EMC en aplicaciones del mundo real
- ✅ Integración y calibración en líneas de montaje de vehículos