
Чтобы спроектировать или выбрать правильный датчик скорости рыскания, важно понять его внутреннюю структуру и то, как каждый компонент работает вместе, чтобы выдавать точные данные об угловой скорости. В этой статье разбирается MEMS-гироскоп, этапы формирования сигнала, методы температурной компенсации и конструкция корпуса, которые являются сердцем каждого автомобильного датчика скорости рыскания.
1. Чип вибрационного гироскопа MEMS
- Принцип работы
- Использует вибрирующую инерционную массу MEMS: когда транспортное средство вращается вокруг вертикальной оси, сила Кориолиса вызывает небольшие смещения в вибрирующей конструкции.
- Дифференциальные электроды обнаруживают это смещение и преобразуют его в аналоговый сигнал напряжения.
- Положительная/отрицательная полярность напряжения соответствует направлению рыскания по часовой стрелке/против часовой стрелки; последующая схема или микроконтроллер преобразует этот сигнал в угловую скорость
- Популярные модели микросхем MEMS
- Bosch BMI270: Интегрированный малошумящий гироскоп и 3-осевой акселерометр; компактность и стабильная работа
- InvenSense ICM-42688-P: Сверхнизкий уровень шума (~0,005°/с/√Гц), встроенная температурная компенсация
- STMicroelectronics L3GD20H: Распространено в промышленных и автомобильных приложениях, быстрый отклик, поддерживает интерфейсы SPI/I²C
- Собственные или индивидуальные проекты
- Некоторые высококлассные производители оригинального оборудования сотрудничают с литейными заводами MEMS для создания индивидуальных форм резонансных полостей с целью повышения чувствительности и температурного дрейфа.
- Экстремальные испытательные автомобили (±400°/с–±500°/с) могут использовать специализированные высокочастотные МЭМС или добавлять масштабирование на уровне схемы для расширения полного диапазона.
2. Аналоговый входной каскад (AFE) и согласование сигнала
- Усиление входного каскада
- Выход МЭМС слабый; малошумящий операционный усилитель используется для усиления первой или второй ступени
- Коэффициент усиления выбирается на основе чувствительности МЭМС (мВ/°/с) и целевого входного диапазона АЦП.
- Аппаратная фильтрация
- Обычно LC-фильтр или RC-фильтр нижних частот устанавливается после усилителя для устранения высокочастотных электромагнитных помех и механических вибрационных шумов
- Частота среза обычно устанавливается на уровне 70 Гц или 100 Гц, чтобы сбалансировать скорость отклика с подавлением шума.
- Обработка АЦП и микроконтроллера
- Отфильтрованный, усиленный сигнал подается в АЦП высокой точности с разрядностью от 12 до 16 бит для оцифровки
- Встроенный микроконтроллер (например, серии STM32, серии NXP S32K, TI TMS320 DSP) считывает оцифрованные данные, применяет температурную компенсацию, дополнительную цифровую фильтрацию и, наконец, линеаризацию.
3. Измерение температуры и компенсация
- Типы датчиков температуры
- Внутренний датчик температуры: Большинство гироскопов MEMS имеют встроенный датчик температуры для измерения температуры перехода в реальном времени.
- Внешний датчик температуры: Для повышения точности компенсации на печатной плате можно разместить отдельный термистор NTC или цифровую ИС температуры (например, TMP117)
- Методы компенсации
- Метод таблицы поиска (LUT): Заводская калибровка записывает нулевое смещение и чувствительность в определенных температурных точках (–40 °C, –20 °C, 0 °C, 25 °C, 50 °C, 85 °C, 125 °C). Микроконтроллер интерполирует между точками в реальном времени.
- Полиномиальная кривая подгонки: Полиномиальные модели первого или второго порядка соответствуют смещению и дрейфу чувствительности в зависимости от температуры, что позволяет сократить объем памяти по сравнению с таблицами преобразования
- Процесс калибровки
- Перед массовым производством каждый датчик калибруется в температурной камере по семи опорным точкам. Нулевое смещение и коэффициенты чувствительности хранятся во Flash-памяти MCU.
- Автоматизированная станция прошивки записывает параметры компенсации в каждое устройство и создает прослеживаемую калибровочную этикетку или отчет.
4. Корпус и снижение электромагнитных помех
- Материалы и конструкция корпуса
- Пластик + армированный стекловолокном (PA66+GF30): Легкий, экономичный, подходит для большинства легковых автомобилей и внедорожников.
- Алюминиевый сплав (ADC12/AlSi10Mg): улучшенное рассеивание тепла и экранирование от электромагнитных помех, часто используется в высококлассных легковых и коммерческих автомобилях
- Внутренняя поддержка и гашение вибраций
- А демпфирующая пенная прокладка или силиконовый демпфер размещается между микросхемой MEMS и печатной платой для поглощения вибраций в диапазоне 20 Гц–2000 Гц
- Печатная плата обычно состоит из четырех или шести слоев: верхний слой для сигналов, нижний слой для заземления, средние слои для питания и дополнительного экранирования для минимизации электромагнитных помех.
- Экранирование и заземление
- Внутренняя часть корпуса покрыта токопроводящей краской или гальванопокрытием, создающим эффект клетки Фарадея, изолирующей внутренние сигналы от внешних электромагнитных помех (например, катушек зажигания, шума генератора).
- Заземление корпуса связано с заземлением шасси транспортного средства для снижения шума контура заземления и поддержания стабильного опорного сигнала.
Навигация по сериям:
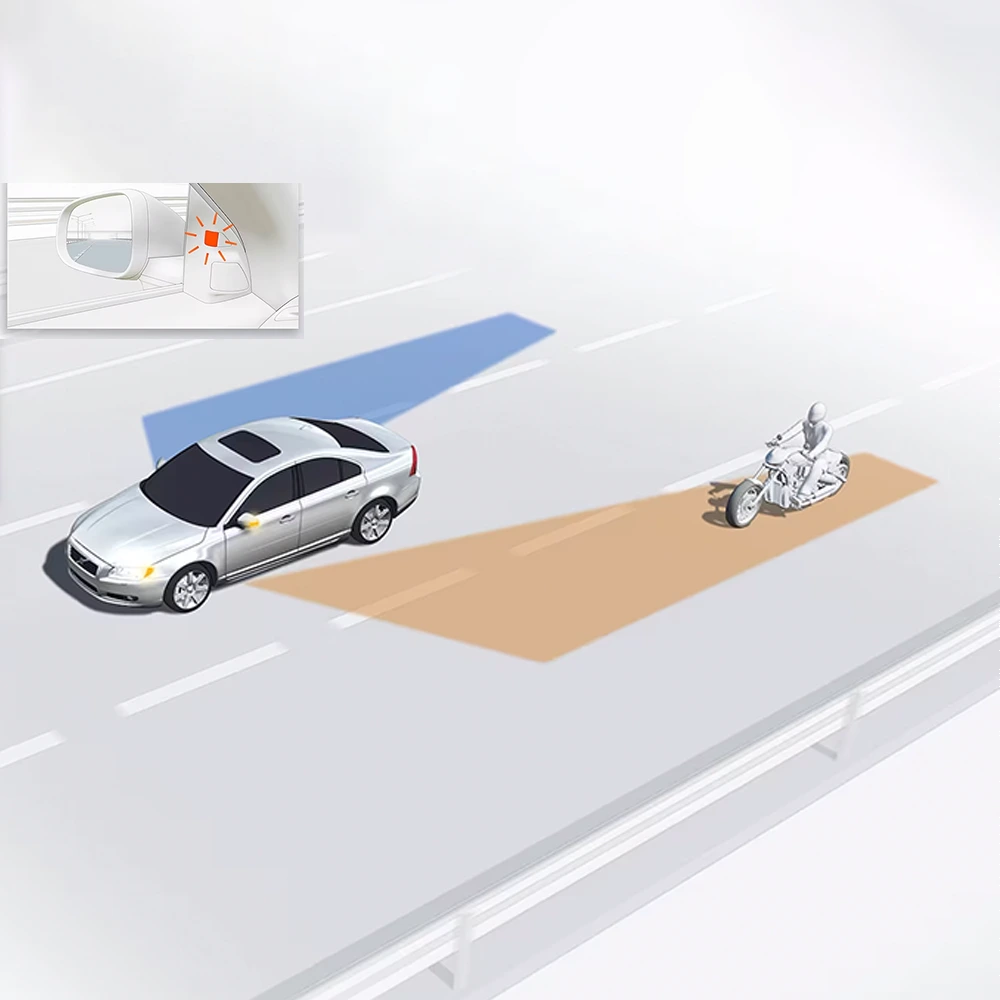
- Расположение и основные функции датчика угловой скорости автомобиля
- Основные компоненты и принципы работы датчика угловой скорости
- Технические характеристики и руководство по моделям датчика угловой скорости
- Датчик скорости рыскания. Адаптивность к окружающей среде и надежность
- Интерфейсы датчиков угловой скорости