
Настоящая проверка датчика угла поворота рулевого колеса заключается не только в том, насколько точно он считывает вращение, но и в том, насколько безопасно и надежно он передает этот сигнал в реальных автомобильных условиях. Мы рассматриваем внутренняя архитектура, стратегия избыточности, и выбор интерфейса быть столь же важными, как и характеристики производительности. В этой статье мы рассмотрим, как структурированы датчики угла поворота рулевого колеса для обеспечения долговременной прочности и соответствия требованиям безопасности, уделяя особое внимание интерфейсам сигналов и системной интеграции.
Внутренняя архитектура: двухканальное ядро
Большинство современных датчиков угла поворота рулевого колеса используют избыточная архитектура двойного зондирования, обычно с использованием двух чипов датчиков Холла, расположенных под углом 180° друг к другу на вращающемся валу или магнитном колесе.
Основные причины увольнений:
- Выполнить ИСО 26262 требования функциональной безопасности (обычно ASIL-B или ASIL-C)
- Обеспечить перекрестную проверку для обнаружения неисправностей (например, застревание, дрейф или выпадение)
- Включить безопасные резервные режимы в случае отказа одного канала
В процессе производства каждый канал датчика тестируется независимо, а ЭБУ постоянно отслеживает несоответствие угла за пределами допустимого отклонения (например, 3°).
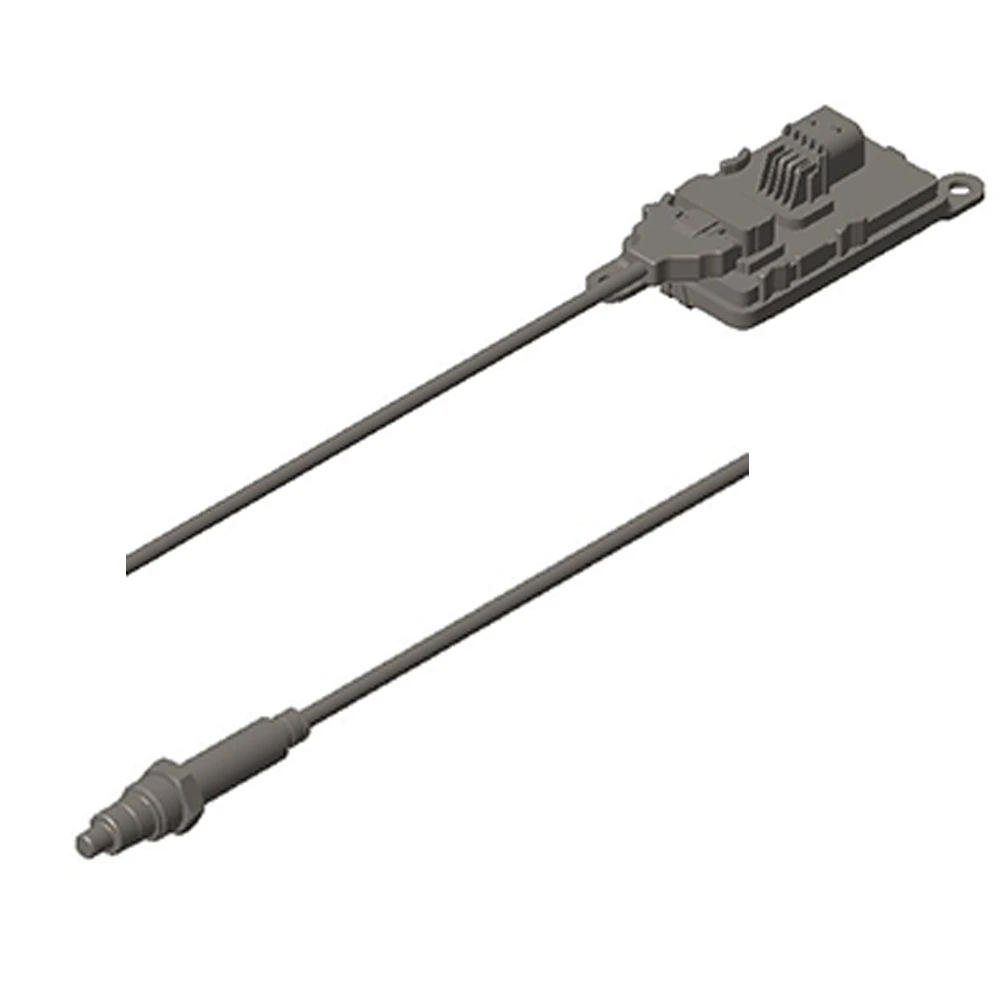
Механическая конструкция: ротационная сборка и герметизация
Сенсорные узлы обычно состоят из:
- А многополюсное магнитное кольцо или намагниченный ротор
- Один или два Микросхемы на эффекте Холла
- А жесткая печатная плата с избыточными сигнальными линиями
- А герметичный корпус рейтинг до IP67/IP6K9K, особенно для подкапотных установок
Для угловых измерений свыше 360° (например, ±720°) механические конструкции могут включать: зубчатые вращающиеся энкодеры или многооборотные алгоритмы отслеживания.
Интерфейсы сигналов: от аналоговых до CAN и SENT
Метод вывода сигнала напрямую влияет на то, как датчик интегрируется с другими системами автомобиля. Общие интерфейсы включают:
| Интерфейс | Типичный вариант использования | Плюсы | Минусы |
|---|---|---|---|
| Аналоговое напряжение | Устаревшие или недорогие системы | Простой | Подверженность электромагнитным помехам |
| ШИМ | Простая цифровая интеграция | Низкое количество выводов | Разрешение ограничено частотой |
| ОТПРАВИЛ | Цифровое решение начального уровня, экономичное | CRC-проверено, быстро | Требуется расшифровка IC |
| СПИ | Высокоскоростная связь ближнего действия | Точный | Требуется экранированная проводка. |
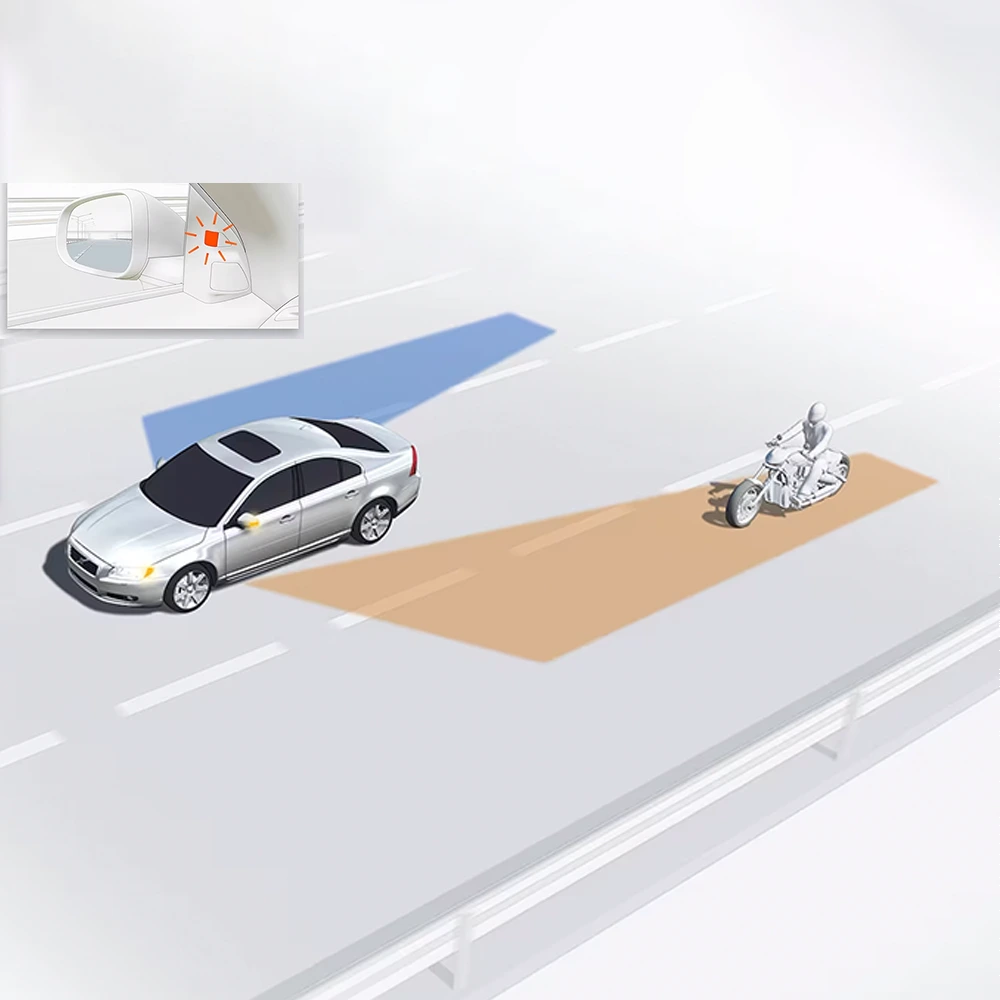
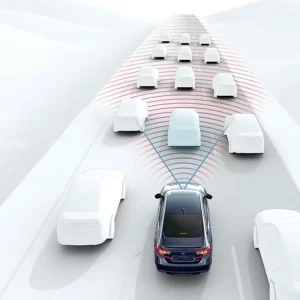
| МОЖЕТ | Расширенный ADAS, EPS | Надежный, стандартизированный | Более высокая стоимость внедрения |
Наша команда обычно рекомендует ОТПРАВЛЕНО или МОЖНО для приложений, где приоритетами являются безопасность, скорость и отказоустойчивость.
Проектирование функциональной безопасности: соответствие стандарту ISO 26262
Критической частью современной архитектуры датчиков является функциональная безопасность. Производители теперь должны проектировать в соответствии с:
- ISO 26262 (Дорожные транспортные средства – Функциональная безопасность)
- Диагностическое покрытие (например, внутренний CRC, самопроверки, диагностика при включении питания)
- Двойные избыточные сигнальные пути и сторожевые таймеры
- Процедуры анализа видов и последствий отказов конструкции (DFMEA)
Функции безопасности, встроенные в прошивку датчика, могут включать:
- Зажимные выходы к фиксированным напряжениям при неисправности
- Декорреляция сигнала: Оба канала посылают различные формы сигналов, которые интерпретирует ЭБУ.
- Проверка нулевой точки после зажигания
Вопросы проектирования электрических и электромагнитных помех
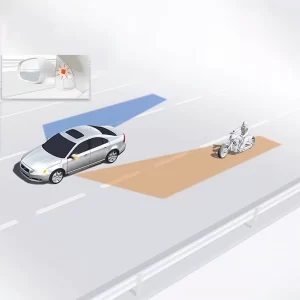
Датчики угла поворота рулевого колеса работают в среде с электрическими помехами от катушек зажигания, инверторов и шин LIN/CAN. Основные конструктивные особенности защиты включают:
- TVS-диоды для защиты от электростатического разряда
- Защита от обратной полярности на входе питания
- Экранированные кабели и витая пара для CAN/SENT
- Надежная изоляция заземления и фильтрация на уровне печатной платы
Выбор разъема и крепления
- Автомобильного класса герметичные разъемы (например, TE, Molex, Yazaki) рассчитаны на диапазон температур от –40°C до +125°C
- Индивидуальные монтажные фланцы для соответствия положению колонны или стойки
- Необязательный антиротационные скобы для предотвращения дрейфа датчика с течением времени
Проектирование для интеграции, а не только для измерения
С точки зрения инженера-технолога, лучшим датчиком угла поворота рулевого колеса является тот, который:
- Измеряет точно и последовательно
- Уверенно сообщает об ошибках
- Легко взаимодействует с несколькими платформами
- Соответствует мировым стандартам безопасности и ЭМС
При оценке или выборе этих датчиков важно обращать внимание не только на базовые характеристики, но и на целостность сигнала, диагностическая способность, и совместимость интерфейса.
📚 Навигация по сериям
- Основы датчиков угла поворота рулевого колеса автомобиля и их роль в динамике транспортного средства
- ✅ Архитектура проектирования — структура датчика, избыточность и интерфейсы сигналов
- Технические характеристики, которые имеют значение — разрешение, линейность и угловой диапазон
- Экологические испытания и соответствие требованиям ЭМС в реальных условиях
- Интеграция и калибровка на линиях сборки автомобилей