Productie en kalibratie van ACC-sensoren: Precisie in de cleanroom
De chirurgische precisie achter de productie van ACC-sensoren
In ISO klasse 5 cleanrooms, waar 10.000 deeltjes per kubieke voet een $1.200 radartoestel kunnen ruïneren, assembleren technici in konijnenpakken ACC-sensoren met precisie op microniveau. Deze blik achter de schermen onthult hoe wonderen van millimetergolven ontstaan door middel van kwantumtunnellijm, heliumlektests en subatomaire uitlijningsprocessen die halfgeleiderfabrieken grof doen lijken.
Productie workflow
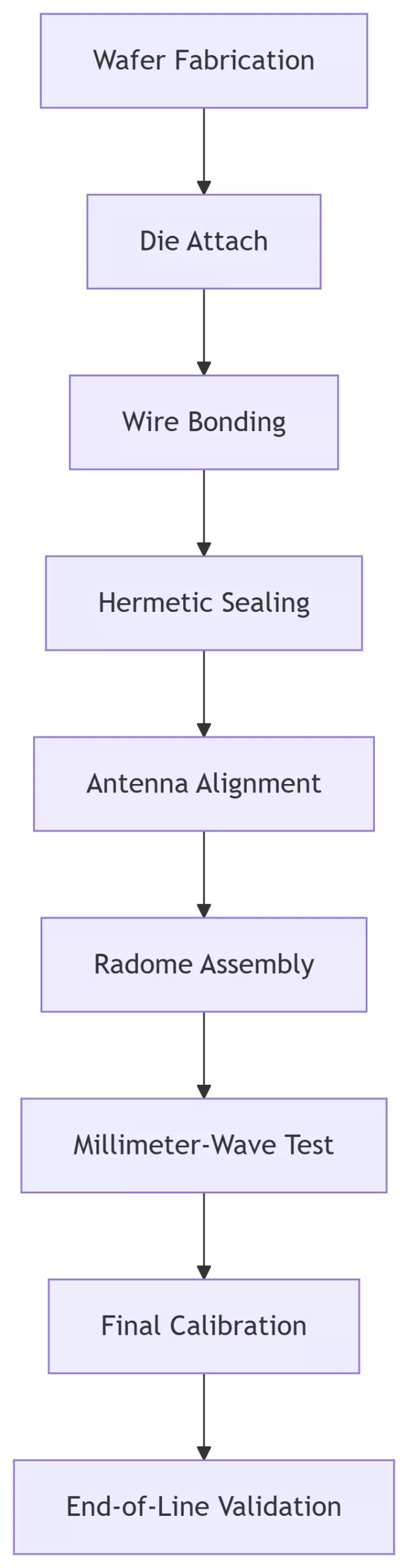
Cyclustijd22 minuten per sensor bij 98,7% first-pass opbrengst
Kritische productiefasen
1. Vereisten voor cleanrooms
| Parameter | Standaard | ACC Vereiste |
|---|---|---|
| Deeltjes (>0,5 μm) | 100.000/ft³ | <1.000/ft³ |
| Temperatuur | 20-25°C | 23±0.1°C |
| Vochtigheid | 40-60% | 45±1% |
| Trilling | - | <1 μm/s² |
2. Montage van antennes

Precisiemetingen:
- Positietolerantie patchantenne: ±3 μm
- Via uitlijning nauwkeurigheid: <1 μm
- Oppervlakteruwheid: Ra < 0,05 μm
3. Hermetisch afdichtingsproces
- Epoxy Toepassing: Gedoseerd met een naald van 50 μm
- Genezen: UV + thermisch (150°C gedurende 30s)
- Lektest: Helium massaspectrometrie
- Aanvaardingscriteria: <1×10-⁹ mbar-L/s leksnelheid
Millimetergolf testen
Near-Field kamerconfiguratie
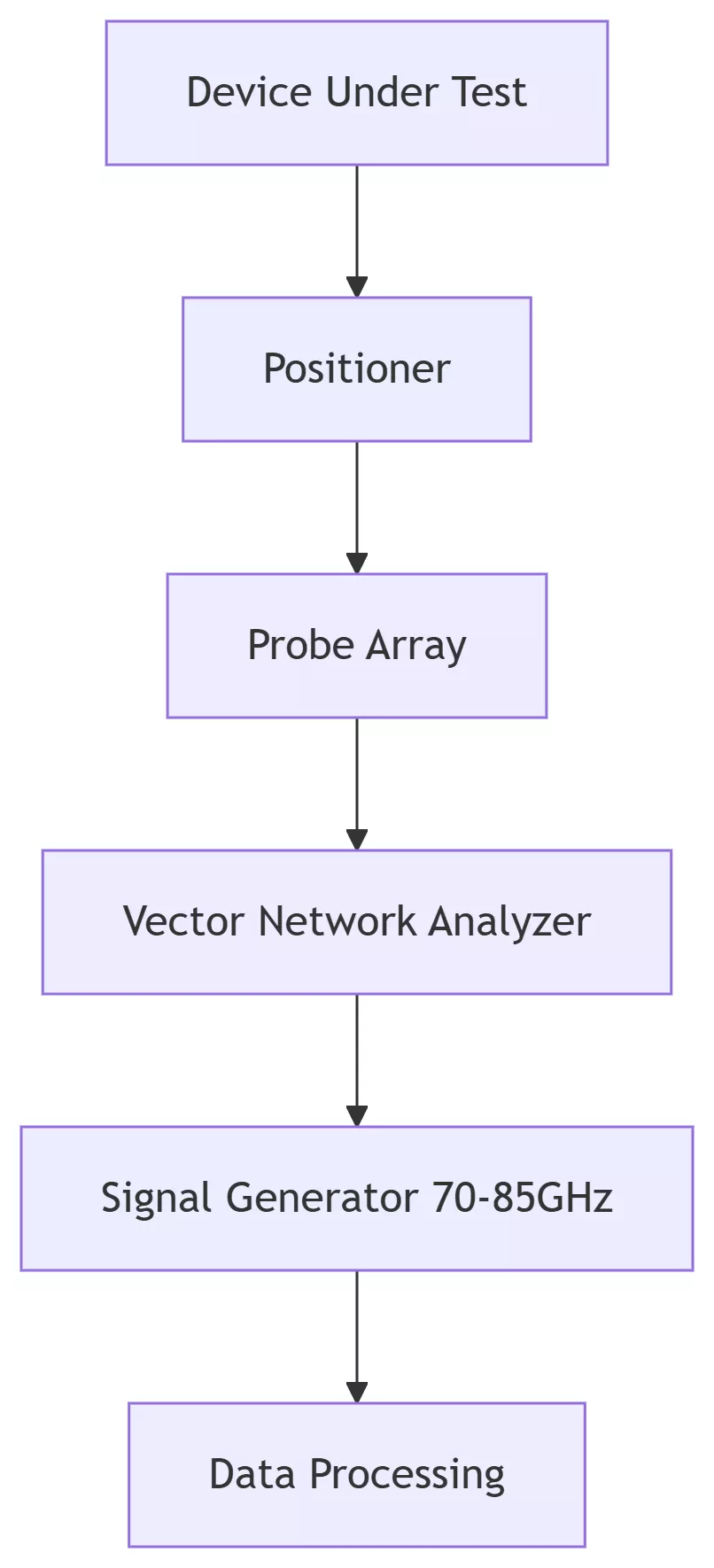
Belangrijkste testparameters:
| Parameter | Testmethode | Tolerantie |
|---|---|---|
| Middenfrequentie | S21 Meting | 77,5±0,1 GHz |
| EIRP | Vermogensmeter | 13±0,5 dBm |
| Straalbreedte | Verre Veld Transformatie | 12±0.3° |
| Zijlobben | Patroonanalyse | <-25 dB |
Kalibratieprotocollen
Kalibratieproces in 3 stappen
Fase 1: Statische kalibratie
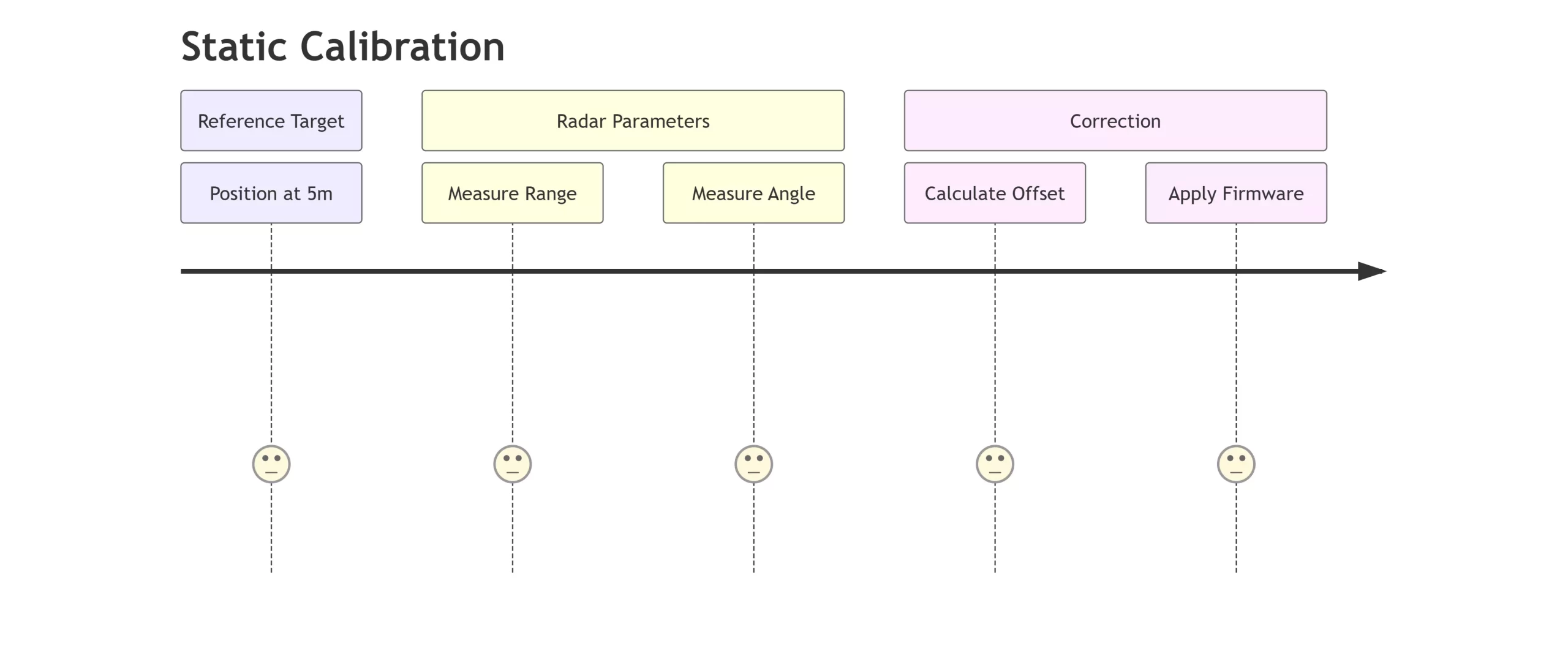
Uitrusting:
- Precisiepositioneerrobot (±0,01 mm)
- Hoekreflector doelen
- Laserinterferometer
Fase 2: Dynamische simulatie
- Emulatie van snelwegscenario's
- 120 bewegende doelen
- Dopplereffecten tot 300 km/u
Fase 3: Stresstest
| Voorwaarde | Duur | Geverifieerde parameters |
|---|---|---|
| Thermisch fietsen | 50 cycli (-40°C tot 125°C) | Frequentieafwijking |
| Trilling | 3 assen, 10-2000 Hz | Fasestabiliteit |
| Vochtigheid | 96 uur bij 95% RH | Hermetische afdichting |
End-of-Line Validatie
Voertuig Simulatie Uitrusting
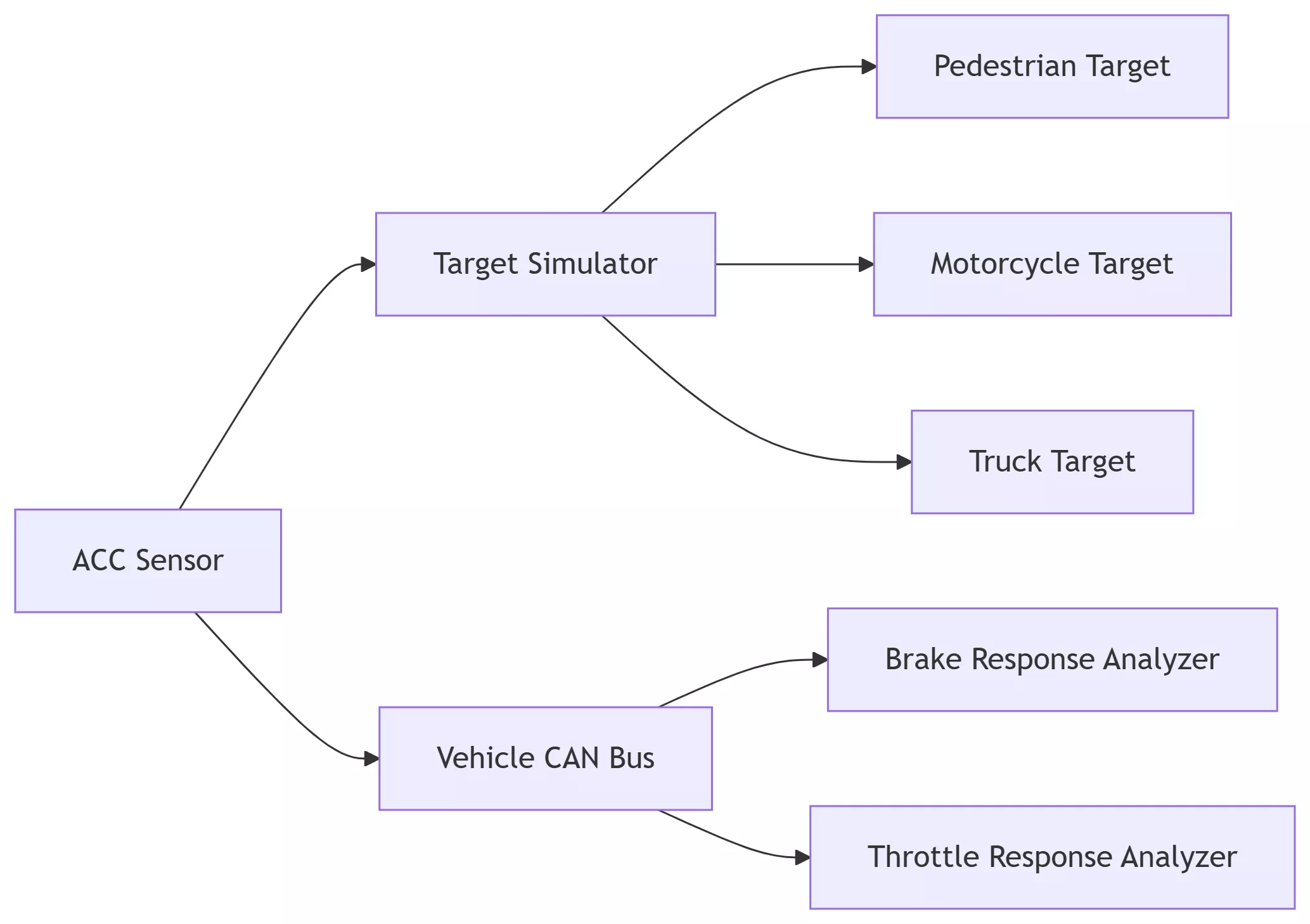
Validatietests:
- Bereik Nauwkeurigheid: 50m, 100m, 150m doelen
- Snelheidsdiscriminatie: 0-200 km/u differentieel
- Objectscheiding: Twee voertuigen op 1,5 m afstand
- Valse doelafwijzing: Discriminatie van verkeersborden
Kwaliteitscontrolestatistieken
Six Sigma productie statistieken
| Parameter | Gemiddelde | 6σ Tolerantie | CpK |
|---|---|---|---|
| Frequentie Stabiliteit | 77,5 GHz | ±0,15 GHz | 2.1 |
| EIRP | 13,2 dBm | ±0,8 dB | 1.8 |
| Bereik Nauwkeurigheid | 0.05m | ±0.3m | 2.3 |
| Snelheidsnauwkeurigheid | 0,12 km/u | ±0,8 km/u | 1.9 |
Defectenpercentage: 127 DPPM (Defecte onderdelen per miljoen)
Cleanroomtechnologie
Geavanceerde omgevingscontroles
- Trillingsisolatie:
- Pneumatische isolatoren met 0,5 Hz uitschakeling
- Granieten tafels (300 mm dik)
- Luchtfiltratie:
- ULPA filters (99,9995% @ 0,12 μm)
- 400 luchtwisselingen/uur
- ESD-bescherming:
- 10⁶-10⁹ Ω oppervlakteweerstand
- Geïoniseerde luchtblazers
Casestudie: Continentale productielijn
Doorbraken in automatisering:
- AI Visuele Inspectie:
- 500MP camerasysteem
- Detecteert defecten van 0,5 μm
- Kwantumtunnellijmen:
- Uitharding in 0,3 seconden
- 50% sterkere banden
- Robotkalibratie:
- 12-assige positionering
- 0,001° hoekresolutie
Resultaten:
- 40% snellere cyclustijd
- 99,2% opbrengst bij eerste passage
- 0 kalibratie rendement in 12 maanden
Toekomstige productietrends
2025+ Technologieën:
| Innovatie | Invloed |
|---|---|
| 3D-geprinte antennes | -50% gewicht, +30% efficiëntie |
| Verpakking op waferniveau | 70% kostenreductie |
| AI zelfkalibratie | Teststations elimineren |
| Quantum radar | 200x verbeterde resolutie |
Belangrijkste punten:
✅ Klasse 1000 cleanrooms microscopische verontreiniging voorkomen
✅ Helium lektesten zorgt voor een perfecte hermetische afsluiting
✅ Robotkalibratie bereikt 0,001° precisie
✅ Six Sigma processen kwaliteit <200 DPPM handhaven
✅ Quantum tunneling lijmen uitharding in 0,3 seconden inschakelen
"ACC-sensoren bouwen is als horloges in elkaar zetten met voorhamers - behalve dat onze 'voorhamers' robotarmen zijn die tot op 50 nanometer nauwkeurig zijn." - Dr. Hiroshi Tanaka, productiedirecteur Bosch Automotive Electronics
Serie Navigatie
- Wat is een afstandssensor voor Adaptive Cruise Control (ACC) en de rol ervan in autonoom rijden?
- Hoe afstandssensoren voorspellend rijden mogelijk maken in ACC-systemen
- Inzicht in veelvoorkomende foutcodes voor ACC-afstandssensor en oplossingsstrategieën
- Problemen oplossen en ACC-systemen onderhouden: Vloot Efficiëntie Gids
- ACC diepgravende sensortechniek: Integratie van radar, AI en V2X
- ✅Productie en kalibratie van ACC-sensoren: Precisie in de cleanroom
- Defecte ACC-sensoren: Forensisch onderzoek en ontwerpontwikkeling
- Stap-voor-stap ACC afstandssensor vervangen en kalibreren
- Fouten vermijden tijdens het vervangen van de ACC-sensor: Kritische tips en herstelstrategieën