







Wat is een afstandssensor voor Adaptive Cruise Control (ACC) en de rol ervan in autonoom rijden?
Afstandssensoren voor adaptieve cruisecontrol (ACC) zijn de "digitale copiloten" die snelwegen omvormen tot autonome corridors. Deze geavanceerde ogen houden niet alleen de snelheid aan zoals bij conventionele cruise control - ze volgen voorliggers, voorspellen bewegingspatronen en zorgen voor nauwkeurige acceleratie/remmen. Door continu meer dan 200 meter ver te scannen, vormen ACC-sensoren de basislaag voor de botsingsvrije toekomst van autonoom rijden.
ACC-sensortechnologieën vergeleken

Hoe ACC-sensoren autonoom rijden mogelijk maken
1. Stichting perceptielaag ACC-sensoren scannen continu de weg en bieden:
- Real-time afstand tot leidende voertuigen (nauwkeurigheid 1 cm)
- Relatieve snelheidsberekeningen (nauwkeurigheid ±0,1 km/u)
- Objectclassificatie (auto/vrachtwagen/motorfiets)
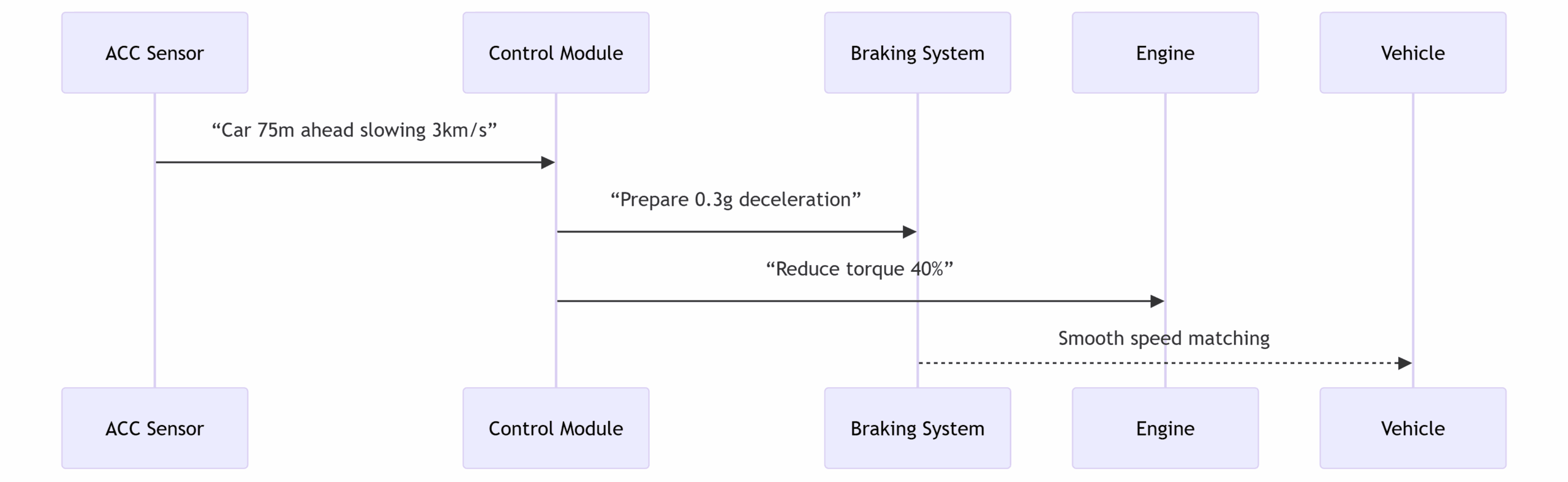
2. Voorspellende rij-intelligentie
3. Autonome functie inschakelen
| Autonome functie | Bijdrage ACC-sensor |
|---|---|
| Automatische piloot | Behoudt een veilige volgafstand bij 130+ km/u |
| File-assistent | Stop-and-go controle onder 60 km/u |
| Voorspellende energie | Anticipeert op heuvels/stroom voor optimale efficiëntie |
| Noodstop | Voorkomen van botsingen bij een vertraging van 0,8 g |
Evolutie naar volledige autonomie
Sensormogelijkheden Progressie

Autonomie niveau inschakelen
- Niveau 1 (Driver Assistance): Basis snelheids-/afstandsregeling
- Niveau 2 (Gedeeltelijke automatisering): Combineert met centreren van rijstroken
- Niveau 3 (Voorwaardelijke automatisering): Beheert al het rijden in ODD*
- Niveau 4+ (Hoge automatisering): Sensorfusie met 360° dekking
*Operationeel ontwerpdomein - specifieke weg-/omgevingsomstandigheden
Specificaties geavanceerde ACC-sensor
| Parameter | Automotive kwaliteit | Autonome rang |
|---|---|---|
| Detectiebereik | 160m | 300m+ |
| Hoeknauwkeurigheid | ±0.5° | ±0.05° |
| Updatefrequentie | 10Hz | 25 Hz |
| Objectscheiding | 1.5m | 0.3m |
| Latentie | 100 ms | 20 ms |
| Storing-operationeel | Geen | Dubbel redundant |
De autonome toekomst: ACC als zenuwstelsel
Tegen 2030 zullen ACC-sensoren zich ontwikkelen tot geïntegreerde perceptiehubs:
- V2X-communicatie: Positie/snelheid naar infrastructuur uitzenden
- Collectieve waarneming: Deel sensorgegevens met wagenparken
- Gezondheidsmonitoring van wegen: Kuilen/obstakels detecteren voor gemeentelijke waarschuwingen
- Voorspellende veiligheid: Anticipeer op kruisende trajectconflicten 500m vooruit
"De ACC-sensoren van vandaag zijn de stamcellen van autonomie - ze voeren aanvankelijk eenvoudige functies uit, maar bevatten het DNA om uit te groeien tot volledig autonome zenuwstelsels." - Dr. Anika Patel, hoofd autonome systemen, NVIDIA
Belangrijkste punten:
ACC-sensoren combineren radar/lidar/camera voor werking in alle omstandigheden
✅ Schakel kritieke autonome functies in zoals file-assistentie
✅ De basis leggen voor ruimtelijk inzicht voor L2-L4-autonomie
Evolueren naar V2X-verbonden weg-ecosysteemintegratie
✅ Overtollige fail-operational ontwerpen vereisen voor hogere autonomieniveaus
Deze technologische evolutie verandert elk woon-werkverkeer op de snelweg in een gesynchroniseerd veiligheidsballet - waarbij sensoren zien wat mensen niet kunnen, voorspellen wat wij niet kunnen en sneller reageren dan onze reflexen toelaten.
Serie Navigatie
- ✅Wat is een afstandssensor voor Adaptive Cruise Control (ACC) en de rol ervan in autonoom rijden?
- Hoe afstandssensoren voorspellend rijden mogelijk maken in ACC-systemen
- Inzicht in veelvoorkomende foutcodes voor ACC-afstandssensor en oplossingsstrategieën
- Problemen oplossen en ACC-systemen onderhouden: Vloot Efficiëntie Gids
- ACC diepgravende sensortechniek: Integratie van radar, AI en V2X
- Productie en kalibratie van ACC-sensoren: Precisie in de cleanroom
- Defecte ACC-sensoren: Forensisch onderzoek en ontwerpontwikkeling
- Stap-voor-stap ACC afstandssensor vervangen en kalibreren
- Fouten vermijden tijdens het vervangen van de ACC-sensor: Kritische tips en herstelstrategieën






